







 Technology
Technology
Technologies used by us for the transmission of the packet data in GSM. In this technology fees are charged for the amount of data transferred, not for the connection time.
GPS – satellite navigation system for determining a geographical position. The system covers the entire globe, its public and free, in order to use it, enough to have a suitable GPS receiver. It consists of 3 segments, the space segment, ground and user. Positions are determined by the measured time of the signals from the satellites to the receiver.
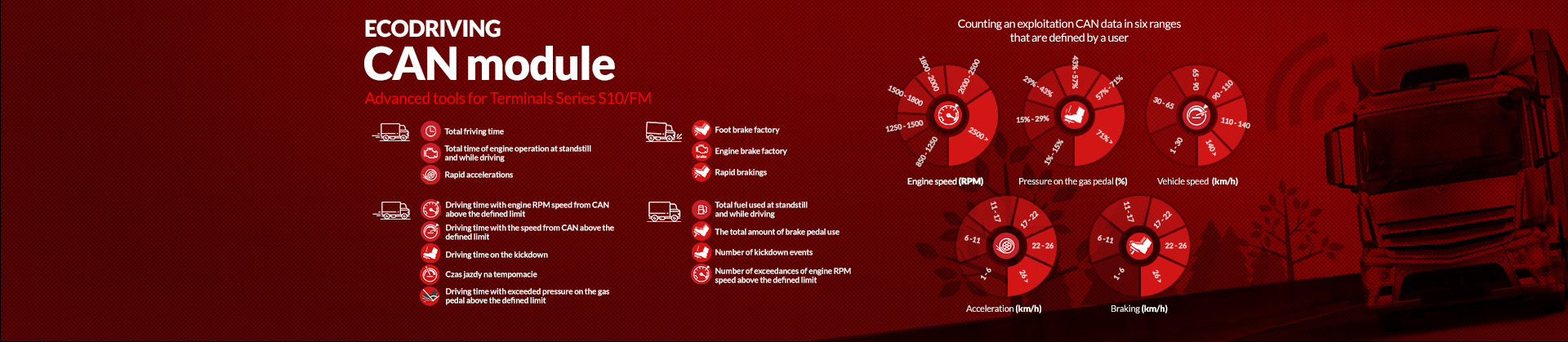
CANbus: J1939, J1708, J1587 – We read the logistics data from the various types of buses. J1939 is a set of standards defined by SAE. They are used in heavy vehicles such as trucks and buses, mobile hydraulics, etc ... In many ways, J1939 is similar to the older standards J1708 and J1587, but it is built on the logistics CAN module. The physical layer (J1939 / 11) describes an electrical interface to the bus. The data link layer (J1939 / 21) describes the principles of constructing messages, access to CAN and detection of transmission errors. Application layer (J1939 / 71 and J1939 / 73) specify the details contained in each message sent by the network.
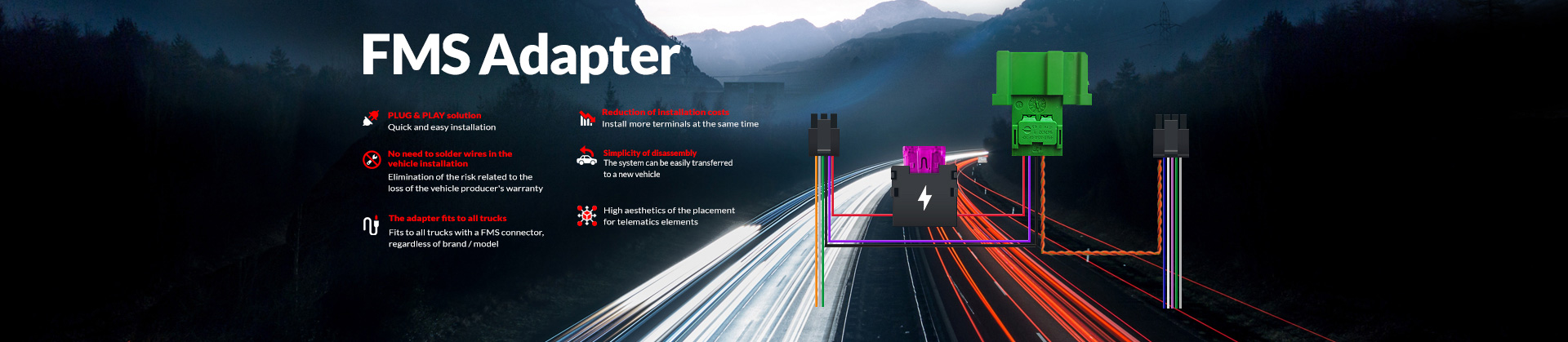
Interface FMS - Fleet Management System is a standard interface that provides logistics data - devices supplied by us are fully compatible with this standard. It was created by six manufacturers Daimler, MAN, Scania, Volvo (including Renault), DAF and Iveco. Encoded data are the same as for the SAE J1939. The frequency of repetition ranges from 20 ms (e.g. in the case of engine speed) up to 10 sekund (e.g. in the case of vehicle identification number). The amount of available data depends on the manufacturer and model of vehicle. If any data is not available from the interface level, producer indicates, that the information can not be read. FMS interface is the global standard. The direct connection to the internal bus system of the vehicle is not allowed by truck manufacturers and could result in warranty void. Some manufacturers are very restrictive in this regard and in their workshops during the revision, they removes all unknown connections to the internal system of the vehicle.
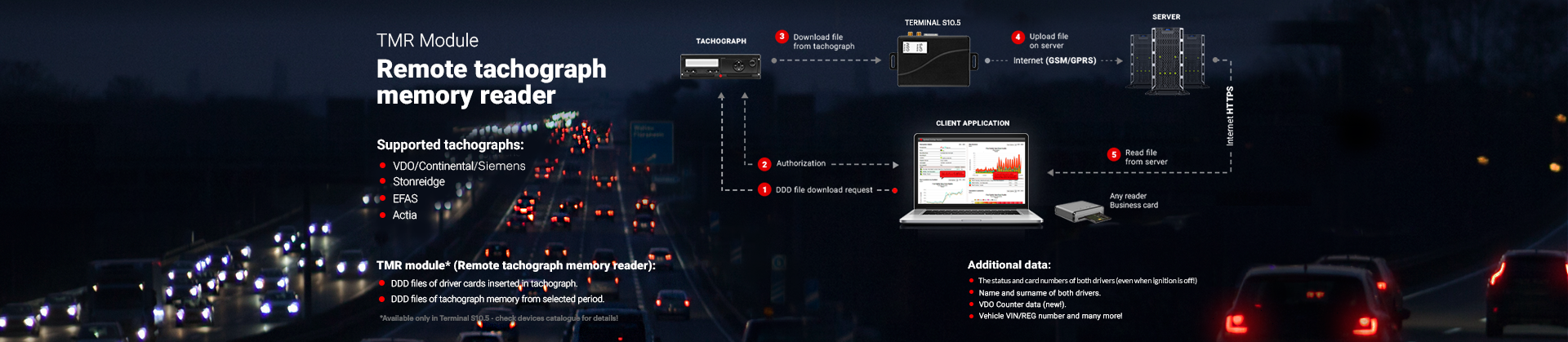
Tachograph – TMR interface – additional module allows for remote reading of the indicated range of tachographs memory and driver cards placed in the slots of the tachograph. Digitally signed file with DDD extension is generated. Such solution allows you to read the data without the need to return the vehicle to the base. The files are protected from editing. When connected to the bus K-Line (D8) It provides a reading of the current status of driver working (driving, rest, work, break) and card numbers of drivers.
CAN-Click – allows the wireless connection of devices to the CAN bus of the vehicle. The main advantages of this are
100% non-invasive technology,
secure and reliable reading of data from the CAN bus,
no physical connection,
the original wiring in the vehicle remain unaffected,
quick installation and
compatibility with the installation of 12V and 24V.
The device is available in two versions:
to J1939 bus
and to J1708 bus.
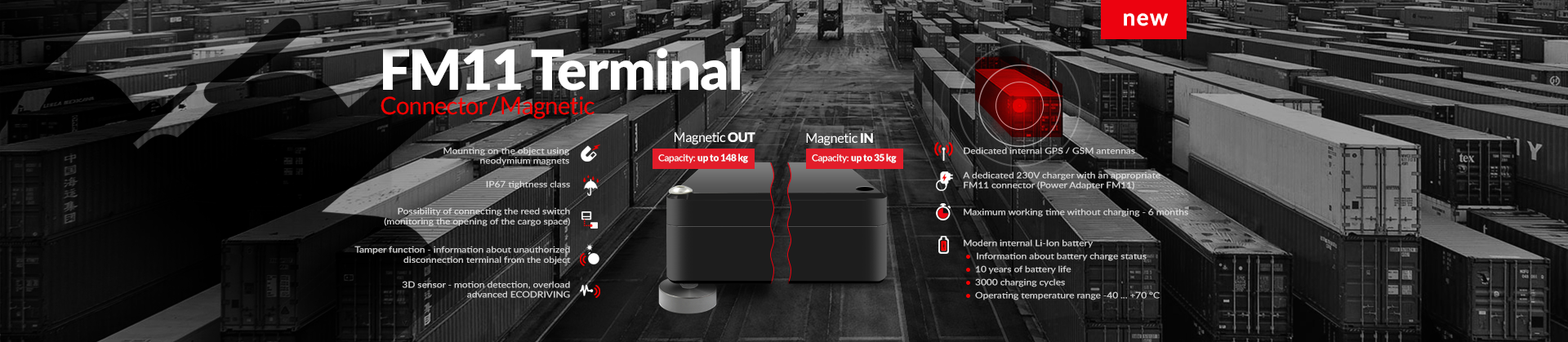
Three-axle sensor 3D – allows to measure acceleration and vibration in 3 dimensions in units of G. This is part of the internal devices, soldered to the printed circuit board.
eCall System – It is a system created in needs of automatic central notify about the road accident. Its purpose is to reduce the number of victims by reducing the time of emergency services arrival, to the road accident. The detection of the accident takes place via an integrated three-axle 3D sensor through exceeding defined in the device overload. Upon the occurrence of such event, the central automatically calls the driver. Fitted to a vehicle speaker and microphone enables the central contact with the victims. Contact with the central is also possible with an additional button offered with the system.
RFID– This technique allows for contactless reading of identification data from passive 125kHz transponders such as cards or pendants. Data read from transponders is sent using a 1-Wire interface.
DALLAS – is a technique working in analogical way as in the RFID. The only difference is that the reading of the identification data is done contactively, and not, as in the case of RFID - contactless.
Immobilizer – Our terminals also allow for the implementation of a function preventing the launch vehicle, by means of an additional transmitter, which will be using the function in case of in the failed authorization of the driver. To use this functionality its necessary to also have an reader like RFID or DALLAS, which will authorize the driver in order to start the vehicle.
RS232TTL - it is the primary medium of communication between our devices and external devices. Our offer includes converters that convert RS232 and RS485 to RS232-TTL, which is supported by the device.
Garmin interface – Our terminals work with navigation systems manufactured by Garmin, which allows you to communicate with the driver via text message. The driver can also receive destination points to which to ride. Communication between Garmin and our devices takes place using cable FMI15 and signal converter RS232 to RS232TTL.
Mobileye interface – we have implemented the support for an external device designed to support the driver during everyday driving. The system is equipped with a camera that allows for: warning of collision, warning of lane changing, recording the events before and after the accident
Analog probes - our terminals support all types of analog sensors, its sufficient to just connect to the analog inputs and youre done!
Digital probes - by our side, we implement a support for digital probes. Their connection to the device is done using the signals converter RS232, RS485 to signal RS232TTL. The digital signal after appropriate treatment is sent directly to the device.